Håkan Lideskog  ,
Back Tomas Ersson,
Urban Bergsten,
Magnus Karlberg
,
Back Tomas Ersson,
Urban Bergsten,
Magnus Karlberg
Determining boreal clearcut object properties and characteristics for identification purposes
Lideskog H., Ersson B. T., Bergsten U., Karlberg M. (2014). Determining boreal clearcut object properties and characteristics for identification purposes. Silva Fennica vol. 48 no. 3 article id 1136. https://doi.org/10.14214/sf.1136
Highlights
- We define the quantitative properties and qualitative characteristics of stumps, stones, slash, and roots, the most important objects interacting with machine activities after clearcutting
- We develop a flowchart showing how a computer-aided system using clearcut object identification should be executed.
Abstract
After clearcutting, machines traffic the clearcut conducting different silvicultural activities. Many objects on a forest clearcut (slash residues, stones, stumps and roots) may disturb e.g. site preparation and planting. This paper describes properties and characteristics of these objects. A flowchart was developed that describes a possible computer-aided system that identifies the objects, and ultimately, makes a machine avoid or target them. A system for obstacle identification creates conditions for further technical development and (semi)automation of e.g., site preparation, mechanized planting, and stump removal.
Keywords
forestry;
forest regeneration;
clearcut obstacles;
terrain description;
terrain conditions;
site properties
-
Lideskog,
Division of Product and Production Development, Luleå University of Technology, SE-97187 Luleå, Sweden
E-mail
hakan.lideskog@ltu.se
- Ersson, Department of Forest Biomaterials and Technology, SLU, SE-90183 Umeå, Sweden E-mail back.tomas.ersson@slu.se
- Bergsten, Department of Forest Biomaterials and Technology, SLU, SE-90183 Umeå, Sweden E-mail urban.bergsten@slu.se
- Karlberg, Division of Product and Production Development, Luleå University of Technology, SE-97187 Luleå, Sweden E-mail magnus.karlberg@ltu.se
Received 7 March 2014 Accepted 25 June 2014 Published 21 July 2014
Views 81677
Available at https://doi.org/10.14214/sf.1136 | Download PDF

1 Introduction
Several machines traffic boreal clearcuts while conducting activities like site preparation, mechanized tree planting, and stump removal. Some objects on the clearcut can become obstacles preventing activities from being optimally conducted, whereas for other activities, some objects are needed to be found and targeted. Stones, stumps, slash and roots impede e.g. site preparation and mechanized planting (Larsson 2011; Luoranen et al. 2011; Ersson et al. 2013) whereas some of these objects need to be located efficiently for other purposes than avoidance, e.g. during slash forwarding and stump removal. Today, identification of objects located on clearcuts is conducted solely by the operator. Because of restrictions in the operator’s ability to identify the surroundings, machine performance is affected. Hence, there exists a potential to further increase the productivity through semi-autonomy or autonomy. Required surrounding information can be retrieved remotely and then analysed in a computer-aided system to finally actuate the machine’s working procedures. Such remote sensing methods could mimic the human vision, e.g. through computer stereo vision or time-of-flight imaging (Hussman et al. 2008), and even exceed human capabilities via e.g. ground penetrating radar (Annan 2009) or acoustic waves (Sabatier and Xiang 2001). Through such techniques, it is plausible that sub-surface object identification, automatic obstacle-avoidance or guidance during stump removal can be enabled.
To date, however, few efforts have been made to increase the degree of autonomy in silvicultural operations. As suggested by e.g. Kemppainen and Visala (2013), planting subsequent to forwarder-based mounding should be possible to conduct automatically by locating suitable planting spots on created mounds using a stereo vision sensing method. Other researchers have forecasted that autonomous operations will soon be reality during both silvicultural (Nilsson et al. 2010) and harvesting operations (Hellström et al. 2009). There exist many technology challenges in order to enable obstacle avoidance and target identification (Vestlund and Hellström 2006). It is impossible to choose a suitable method for obstacle avoidance or target identification before knowing what to actually measure and within what range. Hence, one critical challenge addressed in this paper regards which clearcut object properties and characteristics that are suitable for identification.
Hence, the objective of this study was to outline relevant properties and characteristics of stones, stumps, roots, slash and surrounding soil. This information should facilitate development of technical solutions for identification of those clearcut objects.
2 Method
To address the definition of objects situated on clearcuts, we first identified which types of objects that could interact with silvicultural machinery. Then, we quantified and categorized the clearcut obstacle properties and characteristics for silvicultural operations through a literature review. The objects’ properties were divided into two main categories, quantitative properties and qualitative characteristics. A directly quantifiable property has a certain unit and a certain numerical range while qualitative object characteristics do not have a specific unit. We used the classification method developed by Campbell and Wynne (2011, p. 134–138) which is based on eight significant characteristics of objects and features: tone, texture, shadow, pattern, association, shape, size and site. These characteristics were condensed and adapted to the case of boreal clearcuts. In addition, four other site- and object specific characteristics were included: (1) Can be moved with force exerted during mounding or disc trenching, (2) Degradation over a forest rotational period, (3) Exists above and (4) under ground. These characteristics can be found in Table 1 where each object was classified as either possessing the characteristic (Y), not possessing the characteristic (N), or both (Y/N).
Relevant quantitative properties and qualitative characteristics of objects and features (Table 1) are further explained below. Data mainly represents the boreal forest zone where silvicultural machines commonly traffic clearcuts.
Density – The values for root density include the species Picea abies (L.) Karst., Betula pendula Roth and Pinus sylvestris L. The lowest root density was sampled from P. sylvestris at 301 kg∙m–3, and the highest value from P. abies at 499 kg∙m–3 (Kalliokoski et al. 2008). Maximum slash density was sampled from P. abies branches at 883 kg∙m–3, while B. pendula and P. sylvestris values were lower at 859 kg∙m–3 and 844 kg∙m–3 respectively (Kärkkäinen 1976).
Tensile modulus – For stump, root and slash, the tensile modulus values refer to Populus tremula L. (8.1∙109 Pa) and B. pendula (16.2∙109 Pa), where other Fennoscandian species such as P. abies and P. sylvestris lie in between 9.1∙109 Pa and 11.8∙109 Pa respectively. However, it is plausible that the tensile modulus depend on properties that varies within the object e.g. its density or moisture content.
Thermal conductivity – The stone thermal conductivity range refers to that of granite in Table 1. The stump, root and slash values for thermal conductivity is transversally sampled at 12% moisture content where P. tremula, and P. abies, were lowest at 0.12 W·m–1·K–1 and Betula alleghaniensis Britt. highest at 0.19 W·m–1·K–1. P. sylvestris mean value was measured to 0.15 W·m–1·K–1 (Saarman 1992; Cardarelli 2008). The thermal conductivity, however, will increase with moisture content and specific gravity (Hoadley 2000), but can be assumed static up to 25% moisture content (Cardarelli 2008).
Reflectance – States the percentage of reflected sunlight. For P. sylvestris slash older than six months, values for sunlight reflectance was measured by Lang et al. (2002) to be 3–22% (at 400 m–9 and 1300 m–9 respectively). Reflectance of green P. abies varies from 3–37% (at 680 m–9 and 800 m–9 respectively) at branch level (Williams 1991). An extreme maximum value for photosyntetically active slash is 85% and occurs at the wavelength 1030 m–9 for Picea rubens Sarg., whereas minimum value at 3% occurs at wavelengths below 500 m–9 for many tree species, e.g. B. pendula, Pinus resinosa Ait., Pinus monticola Dougl. ex D. Don, P. tremula etc.
Moisture content – Minimum value of root and stump refers to specimens taken from P. abies in the border where the stump ends and root starts, at different stages after harvest (Laurila and Lauhanen 2010). Therefore, we assume that the minimum values are the same for root and stump. Maximum value for stump refers to P. abies sampled in sapwood (Tsoumis 1991), exceeding the maximum values stated by Laurila and Lauhanen (2010). The range for slash refers to clearcut slash of P. abies (Nurmi 1999). Bark moisture content was measured by Kärkkäinen (1976) whose samples fall within stated maximum and minimum.
Tone variations – denotes the darkness or brightness (or colour intensity) of regions within an image.
Texture – describes the apparent roughness or smoothness of regions in an image. Not necessarily linked to soil texture.
Shadow – an object illuminated from an angle will cast a shadow that could reveal e.g. size and shape characteristics.
Pattern – refers to how individual objects in an image are arranged into distinctive recurring forms.
Association – describes the occurrence of certain objects that, without direct identification, will have certain features bound to it.
Shape – certain shapes are clues for discovering the object’s identity.
Size – refers to the size of objects. The absolute measurements of an object, as well as its relative size in relation to other objects, can be utilized during classification.
Site – refers to the topographic location.
Mobility – refers to whether an object is plausible to move by forces originating from silvicultural machinery.
Degradation – concerns objects consisting of biomaterial.
Exists above or below ground – some objects may exist above or below ground or both.
Some of the objects’, e.g. stones’, criticality depends on the clearance capability of the specific machine used during the silvicultural activity. Likewise, stumps are regarded as non-obstacles during forwarder-based site preparation under a certain minimum stump size and beyond a certain stage of degradation.
3 Results
To enable object identification during silvicultural activities, a necessary first step is to define properties and characteristics of clearcut objects, and then find relevant sensing techniques, tools and methods that could be used operationally for identification (Table 1). Fig. 1 illustrates the flow of information in a suitable computer-aided system where properties and characteristics of clearcut objects are retrieved by the sensing tool. The information is further analysed through algorithms (conducting e.g. object recognition in a 3D-cloud) whereby machine activities are chosen. The specific activities will e.g. make the machine move to the targets or avoid the objects. Irrelevant data are screened out depending on the attribute of the activity.
| Table 1. Quantified obstacle properties, sourced from literature, and obstacle characteristics based on Campbell and Wynne’s (2011) classification of objects. If the obstacle possesses the stated characteristic, a Y (Yes) is marked. An N (No) marks if the obstacle does not possess such characteristic. | |||||
| Characteristic | Stone | Stump | Root | Slash | Soil |
| Density [kg·m–3] | 2500–3200a | 440–670b | 301–499c | 844–883d | 1400–2050e |
| Tensile modulus [109 Pa] | 40–68f | 8.1–16.2b | 8.1–16.2b | 8.1–16.2b | 4.8∙10–4–0.2g |
| Thermal conductivity [W·m–1·K–1] | 2.51–3.97f | 0.12–0.22f | 0.12–0.22f | 0.12–0.22f | 0.17–2.2f |
| Reflectance [%] (λ∈[300m–9 2500m–9])* | 5–80h | 10–65i | - | 3–85i, k | 0–55h, i |
| Moisture content [fresh weight %] | ~0 | 15–64d, j | 15–55j | 29–56d, l | 0–100 |
| Distinguishable tone m | Y | Y | N | Y | Y |
| Distinguishable texture (roughness) m | Y | Y | Y | Y | Y |
| Casts a shadow m | Y/N | Y | N | Y/N | N |
| Forms a distinguishable pattern m | N | Y/N | N | N | N |
| Other objects or features is associated to the obstacle m | Y | Y | Y | Y | Y |
| Distinguishable shape m | Y | Y | Y | Y | N |
| Is found on specific topological sites m | N | Y/N | Y | N | N |
| Can be moved with force exerted during mounding or disc trenching | Y/N | N** | Y/N | Y | Y |
| Degradation over a forest rotational period | N | Y | Y | Y | N |
| Exists above ground | Y | Y | Y/N | Y | N |
| Exists below ground | Y | N | Y | N | Y |
| a Elming (1980); b Tsoumis (1991), Doran (1992), Nordling and Österman (2006); c Kalliokoski (2008); d Kärkkäinen (1976); e Parasnis (1971), Parasnis and Dattatrai (1997), Cardarelli (2008); f Saarman (1992), Cardarelli (2008); g U.S. Army… (1990); h Bowker et al. (1985); i Lang et al. (2002); j Laurila and Lauhanen (2010); k Williams (1991); l Nurmi (1999); m Campbell and Wynne (2011) * λ = wavelength of radiated light ** Applies for stumps > 100 mm in diameter | |||||
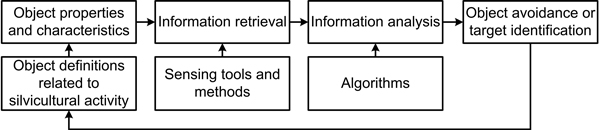
Fig. 1. Flowchart of the activities conducted by a computer-aided system using object identification for avoidance or targeting purposes.
4 Discussion
The information retrieved from an identification procedure could be used in computer-aided systems (Fig. 1). The main advantage of listing properties and characteristics of clearcut objects is that it will enable a requirement specification to be created. With added machine and environmental specific requirements, techniques for object identification can be benchmarked to find techniques that can utilise the listed object properties and characteristics as well as being able to run in specific environments and during specific machine conditions.
As stated by Campbell and Wynne (2011) for process analyses that are “complex and poorly understood”, quantitative data are often insufficient. Hence, in addition, qualitative characteristics are often needed to conduct a successful identification. The ability to separate objects from the surroundings is critical. Some objects’ property ranges are similar to the values of the surrounding soil, c.f. stump, root and slash densities. Therefore, qualitative characteristics such as object shapes could add information values.
In conclusion, the properties and characteristics derived in this paper can be used to develop solutions for automatic identification of relevant objects on clearcuts (in particular stones, stumps, roots and slash). By combining different properties and characteristics, clearcut objects can be identified by classification of type, position and size. Computer-aided systems using this information to avoid obstacles, find stumps, plan routes, etc. will allow for an increased degree of forestry machine automation and precision.
Acknowledgements
This study was partly carried out in a project within the Faste Laboratory, funded by VINNOVA and based at Luleå University of Technology in Sweden. The study was also conducted in a project funded by the Kempe Foundations.
References
Annan A.P. (2009). Electromagnetic principles of ground penetrating radar. In: Jol H.M. (ed.). Ground penetrating radar: theory and applications. Amsterdam, The Netherlands. p. 1–40. http://dx.doi.org/10.1016/B978-0-444-53348-7.00001-6.
Bowker D.E., Davis R.E., Myrick D.L., Stacy K., Jones W.T. (1985). Spectral reflectances of natural targets for use in remote sensing studies. National Aeronautics and Space Administration, Washington.
Campbell J.B., Wynne R.H. (2011). Introduction to remote sensing. 5th ed. The Guilford Press, USA.
Cardarelli F. (2008). Materials handbook: a concise desktop reference. Springer, London.
Doran D.K. (1992) Construction materials reference book. Butterworth-Heinemann Ltd., UK.
Elming S-Å. (1980). Density and magnetic properties of rocks in the Caledonides of Jämtland, Sweden. Geologiska Föreningens i Stockholm Förhandlingar 102: 439–453. ISSN 0016-786X.
Ersson B.T., Jundén L. Bergsten U., Servin M. (2013). Simulated productivity of one-and two-armed tree planting machines. Silva Fennica 47(2) article 958. http://dx.doi.org/10.14214/sf.958.
Hellström T., Lärkeryd P., Nordfjell T., Ringdahl O. (2009). Autonomous forest vehicles: historic, envisioned, and state-of-the-art. International Journal of Forest Engineering 20: 31–38.
Hoadley R.B. (2000). Understanding wood: a craftsman's guide to wood technology. 2nd ed. Taunton Press, Newtown, CT.
Hussmann S., Ringbeck T., Hagebeuker B. (2008). A performance review of 3D TOF vision systems in comparison to stereo vision systems. In: Bhatti A. (ed.). Stereo vision. p. 103–120. http://dx.doi.org/10.5772/5898.
Kalliokoski T., Nygren P., Sievänen R. (2008). Coarse root architecture of three boreal tree species growing in mixed stands. Silva Fennica 42: 189–210. http://dx.doi.org/10.14214/sf.252.
Kärkkäinen M. (1976). Density and moisture content of wood and bark, and bark percentage in the branches of Birch, Norway spruce, and Scots pine. Silva Fennica 10: 212–236. http://dx.doi.org/10.14214/sf.a14794.
Kemppainen T., Visala A. (2013). Stereo vision based tree planting spot detection. IEEE International Conference on Robotics and Automation (ICRA), Karlsruhe, Germany, May 6–10, 2013. http://dx.doi.org/10.1109/ICRA.2013.6630655.
Lang M., Kuusk A., Nilson T., Lükk T., Pehk M., Alm G. (2002). Reflectance spectra of ground vegetation in sub-boreal forests. Tartu Observatory, Tõravere, Estonia. http://www.aai.ee/bgf/ger2600/. [Cited 24 June 2014].
Larsson A. (2011). Selection of soil scarification method in northern Sweden within Sveaskog AB domains. Examensarbeten 2011:9. Department of Forest Ecology and Management, SLU.
Laurila J., Lauhanen R. (2010). Moisture content of norway spruce stump wood at clear cutting areas and roadside storage sites. Silva Fennica 44: 427–434. http://dx.doi.org/10.14214/sf.140.
Luoranen J., Rikala R., Smolander H. (2011). Machine planting of Norway spruce by Bracke and Ecoplanter: an evaluation of soil preparation, planting method and seedling performance. Silva Fennica 45: 341–357. http://dx.doi.org/10.14214/sf.107.
Nilsson U., Luoranen J., Kolström T., Örlander G., Puttonen P. (2010) Reforestation with planting in northern Europe. Scandinavian Journal of Forest Research 25: 283–294. http://dx.doi.org/10.1080/02827581.2010.498384.
Nordling C., Österman J. (2006). Physics handbook. 8th ed. Studentlitteratur, Lund.
Nurmi J. (1999). The storage of logging residue for fuel. Biomass and Bioenergy 17: 41–47. http://dx.doi.org/10.1016/S0961-9534(99)00023-9.
Parasnis D.S. (1971). Physical property guide for rocks and minerals. Geophysical Memorandum 4/71. Atlas Copco Abem, Bromma.
Parasnis D.S., Dattatrai S. (1997). Principles of applied geophysics. 5th edition. Chapman and Hall, London.
Saarman E. (1992). Träkunskap. Specialbok X-726. Sveriges skogsindustriförbund. [In Swedish]. ISBN 91-7322-726-9.
Sabatier J.M., Xiang N. (2001). An investigation of acoustic-to-seismic coupling to detect buried antitank landmines. Geoscience and Remote Sensing, IEEE Transactions on 39: 1146–1154.
Tsoumis G.T. (1991). Science and technology of wood: structure, properties, utilization. Chapman and Hall, New York.
U.S. Army Corps of Engineers (1990). Engineering and design – settlement analysis. Engineer Manual 1110-1-1904. Washington, DC.
Vestlund K., Hellström T. (2006). Requirements and system design for a robot performing selective cleaning in young forest stands. Journal of Terramechanics 43: 505–525. http://dx.doi.org/10.1016/j.jterra.2005.07.001.
Williams D.L. (1991). A comparison of spectral reflectance properties at the needle, branch, and canopy level for selected conifer species. Remote Sensing of Environment 35: 79–93. http://dx.doi.org/10.1016/0034-4257(91)90002-N.
Total of 28 references
