Jussi Manner  ,
Hagos Lundström
,
Hagos Lundström
The effect of boom-tip control on harvester time consumption in Picea abies dominated final-felling stands: case study
Manner J., Lundström H. (2025). The effect of boom-tip control on harvester time consumption in Picea abies dominated final-felling stands: case study. Silva Fennica vol. 59 no. 1 article id 24062. https://doi.org/10.14214/sf.24062
Highlights
- Two experienced harvester operators (A and B) participated in the study
- Operator A reduced time consumption by 10% with boom-tip control, while operator B neither saved nor lost time
- Operator A’s time savings occurred exclusively during the work element felling-processing
- Variation in the results between the operators emphasizes the need for further research involving a larger pool of operators.
Abstract
Crane work accounts for the majority of a harvester’s productive working time. Boom-tip control assists operators by coordinating end-effector movements, offering the potential to improve productivity. With boom-tip control, the operator steers the boom-tip directly rather than controlling individual crane joints. Despite being commercially available for several years, research on boom-tip control’s impact on harvester work – particularly compared to forwarder work – is limited. Therefore, this study analysed the effect of boom-tip control on harvester time consumption (s m-3) in final-felling stands, involving two experienced operators (A and B) driving a John Deere 1470G harvester. John Deere’s boom-tip control system, Intelligent Boom Control (IBC), was compared to a conventional boom-control system. Data were analysed separately for each operator. While operator A saved time using IBC, no statistically significant difference between IBC and the conventional boom-control system was observed for operator B. For operator A, IBC reduced total time consumption (s m-3) by approximately 10%. The results indicate a need for further research, involving multiple machine manufacturers, operators, and work environments such as thinning and final-felling stands. Moreover, future studies should preferably utilise automated data recording to generate large follow-up datasets on harvester work.
Keywords
productivity;
automation;
cut-to-length logging;
crane work;
Intelligent Boom Control (IBC);
Levels of Automation (LoA);
operator assistance system
-
Manner,
Skogforsk, Uppsala Science Park, 751 83 Uppsala, Sweden
 https://orcid.org/0000-0002-4982-3855
E-mail
jussi.manner@skogforsk.se
https://orcid.org/0000-0002-4982-3855
E-mail
jussi.manner@skogforsk.se
- Lundström, Skogforsk, Uppsala Science Park, 751 83 Uppsala, Sweden E-mail hagos.lundstrom@skogforsk.se
Received 10 November 2024 Accepted 11 May 2025 Published 15 May 2025
Views 27764
Available at https://doi.org/10.14214/sf.24062 | Download PDF

Supplementary Files
1 Introduction
The crane is in use for approximately 80–90% of a harvester’s productive working time (Ovaskainen et al. 2004; Nurminen et al. 2006; Pohjala et al. 2024). Therefore, intelligent computer-assistance systems, capable of performing tasks semi-autonomously and thus facilitating harvester-crane work, are of interest to improve harvester productivity. Boom-tip control, which provides computer assistance to the operator in coordinating end-effector movements, is an example of this type of automation. When using conventional boom control (CBC), the operator must manage each crane joint independently, coordinating the movements of individual crane segments to create the desired boom-tip trajectory. In contrast, with boom-tip control, the operator directly manages the boom-tip movement and, consequently, the path of the end-effector, without needing to control the joints separately (Löfgren and Wikander 2009; Lindroos et al. 2017; Manner et al. 2019; La Hera et al. 2021). Boom-tip control is an intelligent system that requires appropriate software and hydraulic cylinders with built-in sensors to monitor the movements of each joint. The software determines how to adjust the length of each hydraulic cylinder to reach the desired boom-tip path, i.e. the crane is steered as a cohesive unit (Fig. 1). The technical principles of boom-tip control are described in detail e.g. in Löfgren and Wikander (2009) and La Hera et al. (2021). Boom-tip control has been commercially available for over a decade (Lindroos et al. 2017); in 2013, John Deere introduced their version of a boom-tip control system, called Intelligent Boom Control (IBC). Soon after, other large forest-machine manufacturers introduced their versions of boom-tip control, such as Smart Crane (Komatsu Forest 2021) and Active Crane (Ponsse 2024).
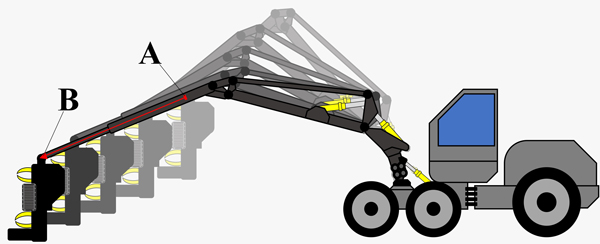
Fig. 1. Simplified illustration of the general principle of boom-tip control. The red arrow indicates the boom-tip’s optimal path (typically the shortest) from its initial (A) to final (B) position. Conducting even such a seemingly simple crane manoeuvre requires precisely controlling different crane parts to combine them into the desired boom-tip path. When using boom-tip control, operators steer the boom-tip directly rather than controlling separate crane parts (i.e. booms and extension). The illustration is based on a generic harvester-crane construction sketch by Gerasimov and Siounev (1998).
In recent years, several field studies have examined IBC’s impact on forwarder work. According to the standardised field experiment of Manner et al. (2017), beginner-level operators (i.e. students at vocational school) can reduce time consumption for crane work by 25–30% when using IBC instead of CBC. During the follow-up study of Manner et al. (2019), professional forwarder operators reduced time consumption for loading- and unloading work on average by 5.8% when using IBC instead of CBC. The authors indicated that this reduction corresponds to approximately a 4% time saving when including the other work elements (i.e. driving empty and driving loaded). According to a standardised field experiment by Hartsch et al. (2024), IBC reduces loading-cycle time by nearly 10% when the forwarder is stationary.
Forest-machine manufacturers have also introduced boom-tip control systems for harvesters (Lindroos et al. 2017; John Deere 2024; Komatsu Forest 2024; Ponsse 2024). Although boom-tip control systems for harvesters have been commercially available for several years, scientific field studies have focused exclusively on forwarder boom-tip control. Therefore, we conducted a field study to determine whether boom-tip control can decrease harvester time consumption (s m–3) for experienced operators in final-felling stands.
2 Material and methods
2.1 Study sites and field-trial setup
Our study comprises two separate field trials (1 and 2), each conducted in different stands located in Sollefteå, Ångermanland County, northern Sweden. Each study stand was divided into two plots. The plot-wise mean-stem volumes were 0.435 m3 and 0.583 m3 for field trial 1, and 0.277 m3 and 0.355 m3 for field trial 2, respectively (Fig. 2A). Thus, stem-volume distributions were not equal but varied somewhat between the plots within each study stand. This variation was controlled statistically, as described in section 2.3. Displacements (i.e. driving distances) between subsequent work positions averaged 2.20 m in field trial 1 and 2.14 m in field trial 2. No statistically significant intra-stand difference was found between the plots (Wilcoxon two-sample test, p > 0.05). Thus, in contrast to stem volumes, stand densities or spatial stem distributions did not vary notably between the plots within each stand. Displacements were calculated according to Manner et al. (2023) based on standard machine data saved in hpr-files. Furthermore, based on the hpr-files, the number of harvested trees per hectare was approximated to be 500 for each study stand. Moreover, according to the Swedish terrain classification schema of Berg (1982), the bearing capacity, ground roughness, and slope of both stands were designated as class 1, except for the slope in field trial 2, which was designated as class 2. This means that ground bearing capacity, surface boulders or inclination did not pose any hindrance for logging operations and the working conditions were uniform within each stand. The stands were dominated by Norway spruce (Picea abies (L.) H. Karst.). In addition, a small number of Scots pines (Pinus sylvestris L.) and birches (Betula spp.) were present in both stands. Clearcutting was performed in both stands during the field trials. The same John Deere 1470G harvester (operating mass: 24 tonnes) was used in both field trials. The machine was equipped with a rotating-levelling cabin, CH9 crane (reach: 10 m), and H425 harvester head. When the machine’s IBC was deactivated, its boom-control system functioned as a CBC, providing a reference system for time consumption (s m–3) comparisons.
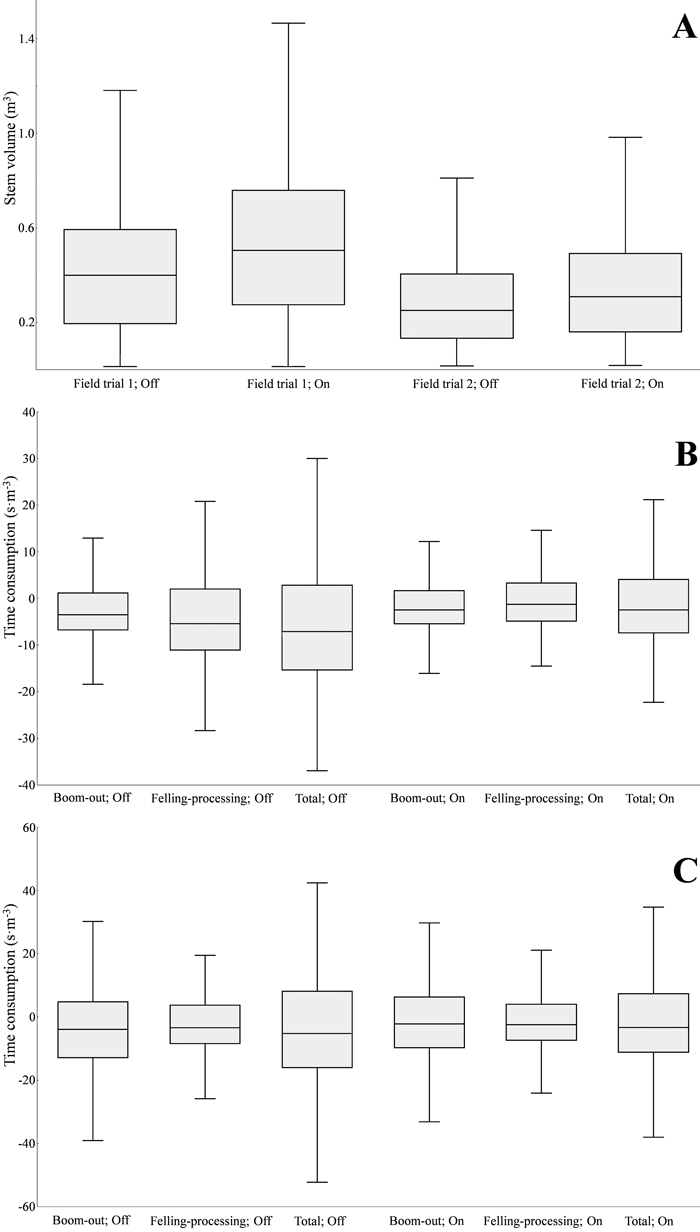
Fig. 2. Stem-volume distributions per plot (A), described using interquartile ranges (IQRs). The label “On” denotes IBC activated, and “Off” denotes IBC deactivated. Residual distributions for time-consumption models – both total and work-element-specific – are described using IQRs for field trial 1 (B) and field trial 2 (C). In all panels (A, B, and C), the IQRs are supplemented with whiskers according to Tukey’s 1.5·IQR rule.
During field trial 1, conducted in July-August 2023, the machine was driven by operator A, who had 40 years of work experience in harvester operation. During field trial 2, conducted in October 2023, the machine was driven by operator B, who had 15 years of work experience in harvester operation. The operators were colleagues employed by the same machine owner. They had received the machine in November 2022 and had IBC activated until the field trials. Therefore, prior to the field trials, operator A had used IBC for approximately eight months, and operator B for 11 months. Thus, both operators had much longer experience using CBC, but more recent and notably shorter experience using IBC. At the beginning of each field trial, the operator switched off IBC and used CBC during the subsequent working shifts. After the first half of each field trial, the operator switched back to IBC and used it during the remaining shifts.
Switching between CBC and IBC more frequently would theoretically improve randomization because each boom-control system would then be used more equally within each stand. However, each switch between the boom-control systems disturbs operators, causing a short-term (detrimental) effect on operator performance, especially when switching from IBC to CBC (Englund et al. 2018; Manner et al 2019). Thus, more frequent switching could have falsely favoured IBC. Moreover, because site conditions were uniform within each stand, more frequent switching would have had little (if any at all) practical impact on the randomization.
2.2 Recording variables and work elements
We divided harvester work into two work elements: boom-out and felling-processing. Boom-out started when the crown of the previously processed stem was dropped on the ground, and it ended when the harvester head was within 1.0 m of the next tree to be felled (c.f. Grönlund and Eliasson 2019), at which point felling-processing started. Felling-processing then ended when boom-out resumed. Displacements, i.e. driving events between subsequent work positions, were included in the work element boom-out. Thus, roughly speaking, all work when the harvester head was holding a stem/log was included in the work element felling-processing, while boom-out included all work when the harvester head was not holding any stem/log. How harvester work is divided into elements, or whether this is done at all, varies between studies. Our approach was to avoid prioritizing overlapping work elements. Therefore, we combined all potentially overlapping tasks into a single work element. Additionally, we summed the boom-out and felling-processing times into the total time. Moreover, the operators occasionally needed to clear undergrowth, but this was excluded from the final dataset. Time-consumption observations included only effective (i.e. productive) work; all delays were excluded. We retrieved information on stem volumes (solid m3 under bark) and tree species from the hpr-files (Arlinger et al. 2021), while time consumption was recorded manually using a handheld Allegro computer running Skogforsk SDI software. The unit of observation was a tree (i.e. stem).
2.3 Statistical analyses
The data were analysed separately for each operator rather than pooled across the field trials for two key reasons. Firstly, IBC’s effect on time consumption was likely to vary substantially between operators (Manner et al. 2019). Secondly, operators working in different study stands would lead to an unbalanced design for operators. It would remain unknown if the possible time consumption (s m–3) differences between the operators were due to actual performance differences between the operators or rather stand conditions. Thus, our study design is balanced only for the boom-control system.
A general linear model was used to analyse the effect of factors on time consumption (s m–3). The boom-control system, i.e. IBC (levels: off and on), and tree species (levels: spruce, pine and birch) were treated as categorical variables. Additionally, stem volume–1 was included as a covariate in the general linear model. Pairwise differences (post hoc) were analysed using the Tukey-Kramer method. Assumptions for analysis of covariance (ANCOVA), e.g. homogeneity of regression slopes and sufficient covariate overlap (>50%) between the factor levels (Fig. 2A), were justified following Underwood (1997) and Barrett (2011). All statistical analyses were conducted using SAS 9.4, with the significance level set at 5%.
3 Results
Overall, activating IBC saved time (s m–3) for operator A who drove the harvester during field trial 1 (Tables 1 and 2). In contrast, there were neither statistically significant nor practically meaningful differences between the boom-control systems during field trial 2 when operator B drove the machine (Tables 1 and 2). Time consumption (s m–3) decreased markedly with increasing stem volume in both field trials, whether analysed as a total or per work element. Because the factor tree species did not statistically significantly contribute to the ANCOVA models or improve residual behaviour (Fig. 2 BC), it was removed from the final time-consumption models (Supplementary file S1).
| Table 1. Mean squares, F-values, and p-values from the analysis of covariance (ANCOVA) for effective time consumption (seconds per solid m3 under bark), presented either as a total or divided into work elements. Stem volume–1 is the covariate, the boom-control system, i.e. IBC (levels: off and on) and tree species (levels: spruce, pine and birch) are the categorical factors. The unit of observation is a tree (i.e. stem). The total number of trees in field trial 1 was 928, and in field trial 2, it was 1024. | |||||
| Dependent variable | Effect | Field trial | Mean square | F-value | P-value |
| Total time | Intercept | 1 | 64498.94 | 11.13 | 0.0009 |
| 2 | 48022.00 | 18.41 | <0.0001 | ||
| Stem volume–1 | 1 | 12734908.90 | 2197.24 | <0.0001 | |
| 2 | 15117065.02 | 5794.65 | <0.0001 | ||
| IBC | 1 | 22697.41 | 3.92 | 0.0481 | |
| 2 | 209.83 | 0.08 | 0.7768 | ||
| Tree species | 1 | 444.72 | 0.08 | 0.9261 | |
| 2 | 4969.56 | 1.90 | 0.1494 | ||
| Boom-out | Intercept | 1 | 1225.05 | 1.20 | 0.2741 |
| 2 | 739.95 | 0.40 | 0.5297 | ||
| Stem volume–1 | 1 | 1652909.06 | 1615.63 | <0.0001 | |
| 2 | 3064558.05 | 1636.62 | <0.0001 | ||
| IBC | 1 | 264.94 | 0.26 | 0.6110 | |
| 2 | 151.42 | 0.08 | 0.7762 | ||
| Tree species | 1 | 1.02 | 0.00 | 0.9990 | |
| 2 | 2759.61 | 1.47 | 0.2295 | ||
| Felling-processing | Intercept | 1 | 47946.00 | 10.40 | 0.0013 |
| 2 | 36839.87 | 43.36 | <0.0001 | ||
| Stem volume–1 | 1 | 5211839.25 | 1130.14 | <0.0001 | |
| 2 | 4568816.85 | 5377.88 | <0.0001 | ||
| IBC | 1 | 18057.85 | 3.92 | 0.0481 | |
| 2 | 4.75 | 0.01 | 0.9404 | ||
| Tree species | 1 | 418.43 | 0.09 | 0.9133 | |
| 2 | 392.30 | 0.46 | 0.6303 | ||
| Because the factor tree species did not statistically significantly contribute to the ANCOVA models or improve residual behaviour, it was removed from the final time-consumption models used in the post-hoc analysis (Table 2). The final time-consumption models are available in Supplementary file S1. | |||||
| Table 2. Least squares means (LSMs) for effective time consumption (seconds per solid m3 under bark) obtained from the ANCOVA (Table 1). LSMs are followed by the lower and the upper confidence limits (LCL; UCL) of the 95% confidence interval, and the number of trees (n). Statistically significant time savings with activated IBC are given in percentages (p < 0.05, Tukey-Kramer method). A hyphen “-” indicates the lack of a statistically significant difference between the boom-control systems (i.e. IBC: off/on). | ||||||||||
| Field trial | Dependent variable | IBC: off (s m–3) | IBC: on (s m–3) | Time saving | ||||||
| LSM | LCL | UCL | n | LSM | LCL | UCL | n | |||
| 1(a | Total time | 99.3 | 92.1 | 106.4 | 440 | 89.3 | 82.5 | 96.1 | 488 | 10.1% |
| Boom-out | 27.9 | 24.9 | 30.9 | 26.8 | 23.9 | 29.6 | - | |||
| Felling-processing | 71.4 | 65.0 | 77.8 | 62.5 | 56.4 | 68.5 | 12.5% | |||
| 2(b | Total time | 118.7 | 113.8 | 123.7 | 418 | 119.4 | 115.4 | 123.5 | 606 | - |
| Boom-out | 42.2 | 38.1 | 46.4 | 42.9 | 39.4 | 46.3 | - | |||
| Felling-processing | 76.5 | 73.7 | 79.3 | 76.6 | 74.2 | 78.9 | - | |||
| a) LSMs at stem volume–1 = 4.877 b) LSMs at stem volume–1 = 6.864 | ||||||||||
A closer examination of post-hoc results shows that activating IBC decreased operator A’s felling-processing time during field trial 1 by 8.9 s m–3 which corresponds to a time saving of 12.5% (Table 2). The boom-control system did not affect operator A’s time consumption for the work element boom-out in a statistically significant or practically meaningful way. Activating IBC decreased operator A’s total time consumption by 10.0 s m–3 or 10.1%. Thus, the reduction in total time consumption occurred almost exclusively during the work element felling-processing.
4 Discussion
The majority of the total variation in time consumption (s m–3) was explained solely by stem volume – highlighting its importance as a control variable in harvester studies (Table 1 and Suppl. file S1). This finding aligns with current literature (Nuutinen et al. 2010; Visser and Spinelli 2012; Ramantswana et al. 2013; Strandgard et al. 2013; Manner et al. 2023; Lindroos et al. 2024; Pohjala et al. 2024). Our study stands consisted almost exclusively (i.e. 95–96%) of Norway spruce. This is one likely reason why the factor tree species did not show any statistically significant effect on time consumption (s m–3). In general, studies on the effect of boreal tree species on harvester productivity are limited, with results varying between studies (cf. Nurminen et al. 2006; Nuutinen et al. 2010; Manner et al. 2023). However, branch and stem characteristics show greater variability in birches and Scots pines compared to Norway spruce (Colin and Houllier 1991, 1992; Mäkinen and Colin 1998). These characteristics, in turn, significantly influence harvester productivity (Suchomel et al. 2011; Labelle et al. 2016).
The large number of replications for a manual time study, the uniform intra-site working conditions, and the well-controlled nuisance variables (i.e. stem volume) are strengths of our study. Moreover, because the harvester was optimally sized in relation to the harvested trees, it could effortlessly handle the felled stems. This contributed further to a coherent dataset with minimal presence of outliers. That said, because the trials took place in different stands, the results are not directly comparable between the field trials (i.e. operators). However, we can raise some questions for future studies. Although learning curves vary between operators (Purfürst 2010), a delayed learning curve is unlikely to explain the divergent outcomes in our study. The operator with less experience using IBC saved time, while the operator with a few months more experience using IBC neither lost nor saved time. This suggests that the operators had sufficient time to adapt to IBC prior to the field trials.
It could further be hypothesised that the greatest potential of boom-tip control lies in thinning rather than in final-felling stands due to smaller stem volumes. Theoretically, as stem volume decreases, the proportion of moving (i.e. driving events between work positions) decreases and the proportion of crane work increases. Thus, the relative impact of crane automation on productivity should increase with decreasing stem volume. That said, because moving constitutes only a relatively small fraction of harvester work (Ovaskainen et al. 2004; Nurminen et al. 2006; Pohjala et al. 2024), the validity of this theory is questionable. Moreover, the operator in field trial 1, who benefited from using IBC, actually harvested larger stems than his colleague in field trial 2. And most importantly, we did not observe any interaction effect between the covariate stem volume and the boom control system (regression slopes were parallel across the groups). This means that the relative difference in time consumption (s m–3) between the boom-control systems (i.e. IBC: off/on) did not vary with stem volume during the field trials.
In contrast, mental load might instead be a more relevant aspect to study. During thinning, the operator must carefully decide the order and selection of trees to cut while avoiding damage to the remaining trees. Boom-tip control may facilitate the steering of the crane and harvester head between the remaining trees, which in turn could ease the operator’s mental load, thereby improving productivity. That said, our study took place in final-felling stands, and the participating operators derived no benefit from IBC during the work element boom-out. Time savings for operator A occurred during the work element felling-processing, which includes felling, boom-in, delimbing, and bucking (these tasks may overlap). Felling-processing is a mentally demanding work element, both in thinning and final-felling stands.
Despite numerous field experiments and research projects on crane automation, its effects on practical forest-machine work are poorly known. There is a lack of time studies on crane automation conducted during ordinary logging operations, particularly long-term follow-up studies. We propose a study on boom-tip control involving harvesters from multiple machine manufacturers, conducted in both thinning and final-felling stands with multiple operators. Moreover, future studies should preferably utilise automated data recording to generate large follow-up datasets on harvester work.
5 Conclusions
Neither of the two professional operators lost time with IBC activated. While acknowledging the limitations of our manually gathered dataset, we conclude that boom-tip control (more precisely, IBC) can notably decrease harvester time consumption (s m–3) for experienced operators in final-felling stands. Equally importantly, our study showed that not all professional harvester operators benefit from time savings with boom-tip control.
Declaration of openness of research materials, data, and code
Dataset and SAS codes used for analysing the data can be found at: https://doi.org/10.5281/zenodo.15253532.
Authors’ contributions
Hagos Lundström initiated the study and collected the data. Jussi Manner analysed the data and wrote the manuscript. Both authors revised the final manuscript.
Funding
This study was financed by Skogforsk.
Acknowledgements
We thank the participating harvester operators and other staff at the Swedish forest company SCA.
References
Arlinger J, Möller JJ, Räsänen T (2021) StanForD 2010 – modern communication with forest machines. Skogforsk.
Barrett TJ (2011) Computations using analysis of covariance. WIREs Comput Stat 3: 260–268. https://doi.org/10.1002/wics.165.
Berg S (1982) Terrängtypsschema för skogsarbete. [Terrain classification system for forestry work]. Forskningsstiftelsen skogsarbeten. Stockholm. ISBN 91-7614-035-0.
Colin F, Houllier F (1991) Branchiness of Norway spruce in north-eastern France: modelling vertical trends in maximum nodal branch size. Ann Sci For 48: 679–693. https://doi.org/10.1051/forest:19910606.
Colin F, Houllier F (1992) Branchiness of Norway spruce in northeastern France: predicting the main crown characteristics from usual tree measurements. Ann Sci For 49: 511–538. https://doi.org/10.1051/forest:19920506.
Englund M, Mörk A, Gelin O, Eliasson L (2018) Påverkan av kranspetsstyrning på nya skogsmaskinförares utveckling. [Effects of boom tip control on the learning progress of new forest machine operators]. Skogforsk, Arbetsrapport 968-2018.
Gerasimov YY, Siounev VS (1998) Forest machinery crane compound scheme synthesis: “Skeleton” part. J For Eng 9: 25–30.
Grönlund Ö, Eliasson L (2019) Birch shelterwood removal – harvester and forwarder time consumption, damage to understory spruce and net revenues. Int J For Eng 30: 26–34. https://doi.org/10.1080/14942119.2019.1595943.
Hartsch F, Schönauer M, Pohle C, Breinig L, Wagner T, Jaeger D (2024) Effects of boom-tip control and a rotating cabin on loading efficiency of a forwarder: a pilot study. Croat J For Eng 45: 71–84. https://doi.org/10.5552/crojfe.2024.2179.
John Deere (2024) https://www.deere.com/en/wheeled-harvesters/. Accessed 6 November 2024.
Komatsu Forest (2021) https://www.komatsuforest.com/media/newsroom/smart-crane-on-komatsu-forwarders-simplifies-the-working-day. Accessed 6 November 2024.
Komatsu Forest (2024) https://www.komatsuforest.com/forest-machines/our-wheeled-harvesters/smart-crane-for-harvesters. Accessed 6 November 2024.
Labelle ER, Soucy M, Cyr A, Pelletier G (2016) Effect of tree form on the productivity of a cut-to-length harvester in a hardwood dominated stand. Croat J For Eng 37: 175–183.
La Hera P, Ortiz Morales D, Mendoza-Trejo O (2021) A study case of dynamic motion primitives as a motion planning method to automate the work of forestry cranes. Comput Electron Agr 183, article id 106037. https://doi.org/10.1016/j.compag.2021.106037.
Lindroos O, La Hera P, Häggström C (2017) Drivers of advances in mechanized timber harvesting: a selective review of technological innovation. Croat J For Eng 38: 243–258.
Lindroos O, Pettersson J, Nordfjell T (2024) How stem size variations in forest stands influence harvester productivity and the use of productivity models. Int J For Eng 35: 389–398. https://doi.org/10.1080/14942119.2024.2387523.
Löfgren B, Wikander J (2009) Kinematic control of redundant knuckle booms. Int J For Eng 20: 22–30. https://doi.org/10.1080/14942119.2009.10702572.
Mäkinen H, Colin F (1998) Predicting branch angle and branch diameter of Scots pine from usual tree measurements and stand structural information. Can J Forest Res 28: 1686–1696. https://doi.org/10.1139/x98-141.
Manner J, Gelin O, Mörk A, Englund M (2017) Forwarder crane’s boom tip control system and beginner-level operators. Silva Fenn 51, article id 1717. https://doi.org/10.14214/sf.1717.
Manner J, Mörk A, Englund M (2019) Comparing forwarder boom-control systems based on an automatically recorded follow-up dataset. Silva Fenn 53, article id 10161. https://doi.org/10.14214/sf.10161.
Manner J, Karlsen T, Ersson BT (2023) A pilot study of continuous cover forestry in boreal forests: decreasing the harvest intensity during selection cutting increases piece size, which in turn increases harvester productivity. J For Sci 69: 172–177. https://doi.org/10.17221/22/2023-JFS.
Nurminen T, Korpunen H, Uusitalo J (2006) Time consumption analysis of the mechanized cut-to-length harvesting system. Silva Fenn 40: 335–363. https://doi.org/10.14214/sf.346.
Nuutinen Y, Väätäinen K, Asikainen A, Prinz R, Heinonen J (2010) Operational efficiency and damage to sawlogs by feed rollers of the harvester head. Silva Fenn 44: 121–139. https://doi.org/10.14214/sf.165.
Ovaskainen H, Uusitalo J, Väätäinen K (2004) Characteristics and significance of a harvester operator’s working technique in thinnings. Int J For Eng 15: 67–77. https://doi.org/10.1080/14942119.2004.10702498.
Pohjala J, Vahtila M, Ovaskainen H, Kankare V, Hyyppä J, Kärhä K (2024) Effect of prior tree marking on cutting productivity and harvesting quality. Croat J For Eng 45: 25–42. https://doi.org/10.5552/crojfe.2024.2213.
Ponsse (2024) https://www.ponsse.com/en/web/guest/products/tailored-solutions/product/-/p/activecranebisonbuffaloelephant#/. Accessed 6 November 2024.
Purfürst FT (2010) Learning curves of harvester operations. Croat J For Eng 31: 89–97.
Ramantswana M, McEwan A, Steenkamp J (2013) A comparison between excavator-based harvester productivity in coppiced and planted Eucalyptus grandis compartments in KwaZulu-Natal, South Africa. South Forests 75: 239–246. https://doi.org/10.2989/20702620.2013.858213.
Strandgard M, Walsh D, Acuna M (2013) Estimating harvester productivity in Pinus radiata plantations using StanForD stem files. Scand J Forest Res 28: 73–80. https://doi.org/10.1080/02827581.2012.706633.
Suchomel C, Becker G, Pyttel P (2011) Fully mechanized harvesting in aged oak coppice stands. Forest Prod J 61: 290–296. https://doi.org/10.13073/0015-7473-61.4.290.
Underwood AJ (1997) Experiments in ecology: their logical design and interpretation using analysis of variance. Cambridge University Press, Cambridge. https://doi.org/10.1017/CBO9780511806407.
Visser R, Spinelli R (2012) Determining the shape of the productivity function for mechanized felling and felling-processing. J For Res 17: 397–402. https://doi.org/10.1007/s10310-011-0313-2.
Total of 32 references.
